Ackern komplett ohne Fahrer? Wie das in der Praxis zur Zeit aussieht, schauten wir uns beim Drillen und Hacken von Mais an. Dabei haben wir auch verschiedene Unkrautregulierungssmaßnahmen und Kostenberechnungen betrachtet.
Feldroboter, die Standardtraktoren ersetzen können, sind bisher selten. Der VTE von Krone und Lemken ist noch in der Entwicklung, ebenso der Roboter Karl von Kuhn. Anders hingegen der AgBot von AgXeed. Auch wenn dieser permanent weiterentwickelt wird, ist das Zugfahrzeug bereits seit über zwei Jahren im Markt.
Zurzeit gibt es den AgBot als Raupe und in zwei Radversionen. Wir konnten in einem Gemeinschaftsprojekt zusammen mit Amazone und AgXeed im vergangenen Frühjahr und Sommer Mais mit einem AgBot 2.055W4 anbauen. Amazone ist wie Claas finanziell am Unternehmen AgXeed beteiligt.
Jetzt bestellen und weiterlesen!
profi - Das Fachmagazin für Landtechnik
Upgrade für Heftleser
Heftleser? Jetzt günstig upgraden!
25,80 EUR
/
Jahr
Profitieren Sie vom nahtlosen Überang zwischen Heft und Website
Zugang zu sämtlichen Inhalten auf profi.de
Zugriff auf alle profi Ausgaben und Sonderhefte (Digital)
Feldroboter, die Standardtraktoren ersetzen können, sind bisher selten. Der VTE von Krone und Lemken ist noch in der Entwicklung, ebenso der Roboter Karl von Kuhn. Anders hingegen der AgBot von AgXeed. Auch wenn dieser permanent weiterentwickelt wird, ist das Zugfahrzeug bereits seit über zwei Jahren im Markt.
Zurzeit gibt es den AgBot als Raupe und in zwei Radversionen. Wir konnten in einem Gemeinschaftsprojekt zusammen mit Amazone und AgXeed im vergangenen Frühjahr und Sommer Mais mit einem AgBot 2.055W4 anbauen. Amazone ist wie Claas finanziell am Unternehmen AgXeed beteiligt.
Jetzt bestellen und weiterlesen!
profi - Das Fachmagazin für Landtechnik
Upgrade für Heftleser
Heftleser? Jetzt günstig upgraden!
25,80 EUR
/
Jahr
Profitieren Sie vom nahtlosen Überang zwischen Heft und Website
Zugang zu sämtlichen Inhalten auf profi.de
Zugriff auf alle profi Ausgaben und Sonderhefte (Digital)
Zudem hat die Hochschule Osnabrück im Rahmen des Projekts Agro-Nordwest einen Versuch mit den gleichen Maschinen wissenschaftlich durchgeführt und Zahlen zu Verunkrautung, Zeitbedarf, Ertrag und Kosten erhoben.
Bei unserem Einsatz ging es darum, den aktuellen Stand der Technik zu nutzen und zu sehen, was bereits möglich ist.Außerdem sollte gezeigt werden, welche Technik noch in der Entwicklung ist bzw. noch entwickelt werden muss. Hier stellen wir Ihnen die Ergebnisse vor.
Fahrzeugaufbau
Der AgBot 2.055W4 hat 55 kW Leistung, die er aus einem Deutz-Dieselmotor mit vier Zylindern und 2,9 l Hubraum schöpft. Der Diesel treibt einen Generator an, der wiederum alle anderen Komponenten mit Strom versorgt — auch den Fahrantrieb. Die maximale Geschwindigkeit liegt bei 13,5 km/h. „W4“ in der Typenbezeichnung steht für vier Reifen (Wheel).
Das 75 PS starke Fahrzeug lässt sich individuell ausstatten. So sind selbst Baugruppen wie Zapfwelle, Hydraulik, Heck- und Frontkraftheber (ohne aktive Hubwerksreglung) nicht im Grundpreis enthalten. Stattet man die Maschine wie einen normalen Traktor aus, liegt man bei einem Endkundenpreis zwischen 195.000 und 207.000 Euro (alle Preise ohne MwSt.). Das Spurführungssystem ist hierbei integriert.
Zum Vergleich: Ein Fendt 207 Vario ProfiPlus mit maximal 58 kW/79 PS liegt in Vollausstattung (ohne Frontlader) bei einem Listenpreis von rund 173.000 Euro, inklusive Lenksystem und automatischer Wendefunktion am Vorgewende.
AgXeed bietet neben der 75-PS-Vierradmaschine auch eine gleichstarke Dreiradversion und eine 156 PS starke Variante mit zwei Raupenlaufwerken an. Hier liegt der Endkundenpreis laut Hersteller zwischen 310.000 und 325.000 Euro.
Vor dem ersten Einsatz
Damit der AgBot in der Fläche weiß, wo er fahren soll, muss man die gesamte Feldgrenze mit einem GNSS-RTK-Stab ablaufen bzw. abfahren. Diese Daten spielt man dann in das Online-Portal von AgXeed. Auch innere Grenzen um beispielsweise Bäume oder Seen im Acker sind anzulegen.
Zum Einrichten der Arbeitsschritte nutzt man im Idealfall einen Computer. Hier lassen sich die umfangreichen Eingaben übersichtlich erstellen. Vor dem ersten Einsatz müssen viele Daten wie Arbeitsbreite, Gerätelänge und -breite, Applikationspunkt usw. eingegeben werden — übrigens auch bei Isobus-Maschinen, da diese zur Zeit zu wenig Informationen zur Verfügung stellen.
Beim Einrichten des Arbeitsschrittes hinterlegt man dann noch zusätzlich Parameter wie Arbeitstiefe bzw. Hubwerksstellung, Hydrauliksteuergeräte, Fahrgeschwindigkeit usw. Diese Einstellungen muss man im Feld überprüfen und gegebenenfalls anpassen. Hat man für einen Arbeitsgang die optimalen Einstellungen gefunden, lässt sich daraus eine Vorlage erstellen und diese immer wieder verwenden. Teilflächenspezifische Einstellungen wie Arbeitstiefe, Geschwindigkeit oder Ausbringmenge sind bisher nicht möglich.
Sind alle Vorkehrungen getroffen, kann das System die Fahrspuren berechnen. Hierbei lässt sich auch auswählen, ob das Vorgewende zu Anfang oder zum Schluss bearbeitet werden soll. Die Hauptbearbeitungsrichtung kann man ebenfalls einstellen und dazu eine Feldkante auswählen. Die Berechnung dauert selbst bei unförmig zugeschnittenen Flächen nur einige Sekunden. Das System zeigt direkt an, wie lange es etwa dauern wird, den Acker zu bearbeiten.
Zum Feld
Der AgBot kommt legal nur per Tieflader zum Feld. Das erhöht die Investitionskosten weiter. Mit einer kleinen Fernbedienung rangiert man das Fahrzeug und kuppelt das Anbaugerät an. In unserem Fall wählten wir für den ersten Arbeitsgang mit dem AgBot eine Kreiselegge, da die Fläche zuvor konventionell gepflügt wurde.
Mit der Kreiselegge ging es dann auf den Anhänger. Eine Automatikfunktion gibt es weder für das Kuppeln des Anbaugeräts noch für die Fahrt auf den Tieflader. Anschließend muss der Roboter verzurrt werden. Das kostet im Vergleich zur Traktorvariante Zeit. Zudem muss für den Tieflader ein Zugfahrzeug, z. B. ein Schlepper zur Verfügung stehen.
Am Feld muss eine Rangierfläche vorhanden sein, um den AgBot zu entladen. Per Fernbedienung fährt man ihn zur ersten Fahrspur und wechselt dann in den Automatikmodus.
Damit der Roboter auf dem Feld alleinseine Bahnen ziehen darf, überwachen unter anderem ein Lidar- sowie Radar- und Ultraschall-Sensoren im Sicherheitsbumper (vorne am AgBot) das Umfeld. Im 3 m breiten Bumper sind zudem berührungsempfindliche Fühler integriert, sollten alle anderen Sensoren versagen. Im Normalfall, so auch bei unserem Test, verlangsamt der Roboter seine Fahrt, sollte in der Nähe ein unbekanntes Objekt auftauchen. Nähert sich der AgBot dem Hindernis, bremst er bis zum Stillstand ab. Entfernt sich das Hindernis innerhalb kurzer Zeit wieder, fährt der Roboter weiter. Bleibt das Objekt im Gefahrenbereich, wird der Landwirt per Push-Nachricht auf dem Smartphone informiert. Die Maschine kann nicht selbstständig ein auftauchendes Hindernis umfahren.
Die Überwachung des Arbeitsergebnisses oder der Anbaugerätefunktionen gab es zum Testzeitpunkt noch nicht. Der Hersteller-Zusammenschluss 3A ist seit der Agritechnica 2023 damit in der Entwicklung. Auch sollen Schnittstellen herstellerübergreifend standardisiert werden. Laut AgXeed ist jetzt schon ein Kabelbaum mit Sensoren verfügbar, den man an seinen Geräten nachrüsten kann. So soll sich z. B. die Drehzahl einer Nachlaufwalze oder der Füllstand einer Sämaschine überwachen lassen. Der Landwirt erhält auch dann eine Nachricht.
Aktiv auf veränderte Werte reagieren kann der AgBot nicht. Er hält nur an. Deshalb sollte man für den Einsatz am Roboter nur unempfindliche Geräte bzw. ihn nur auf einfach zu bearbeitenden Flächen einsetzen. Bei unserem Testeinsatz machte die Kreiselegge keine Probleme. Der AgXeed zog in Ruhe seine Bahnen.
Maislegen
Ähnlich lief es mit dem Amazone-Einzelkornsägerät Precea am 8. Mai 2024. Auch hier konnten wir nur eine 3-m-Version fahren, denn für einen sicheren, unbeobachteten Betrieb ist der Frontbumper mit den Sicherheitssensoren erforderlich, den es bisher nur mit 3 m bzw. 4 m (starr) gibt. Eine 6-m-Version ist in Planung.
Die Steuerung der Precea lief über das separate Isobus-Terminal Amatron 4. Hier wurden auch die Einstellungen zur Aussaatstärke (9,5 Pflanzen/m²) vorgenommen. Leider gibt es keinen Display-
Fernzugriff. Auch kann der AgBot nicht auf Daten des Isobus zugreifen und so z. B. den Landwirt informieren, wenn etwas mit einem Dosierorgan nicht stimmt, andere Störungen auftreten oder auch nur der Saattank leer ist. Hier arbeiten Roboter und Anbaugerät noch völlig unabhängig voneinander. Die Entwicklungen laufen zur Zeit, damit Gerät und AgBot miteinander kommunizieren.
Ziel des Versuches war eine hybride Unkrautbekämpfung mit Bandspritze und Hacke. Dabei erfolgte die Pflanzenschutzbehandlung mit einem Traktor und gezogener UX-Spritze von Amazone. Da sich weder der AgBot noch die Spritze mit aktiver Anbaugeräte-Steuerung ausstatten lassen, wurde das Spritzband mit 30 cm Breite gewählt, um trotz eventueller Ungenauigkeiten alle Maisreihen mit dem Herbizid zu behandeln. Die Wirkstoffeinsparung lag so bei 60 %.
Zwischen den Reihen folgte zehn Tage später die vierreihige Hacke mit je drei Hackscharen. Da beim Spritzen genug Sicherheitsabstand durch das Herbizid gegeben war, reichte dieser nur knapp 45 cm bearbeitete Streifen aus, um alle Unkräuter zu erwischen. Aufgrund des Abstands zur Reihe wurde auch ohne Kameratechnik kein Mais beschädigt.
Die Hochschule Osnabrück hat mit den gleichen Maschinen eigene Versuche angelegt. Bei der Unkrautregulierung haben sie drei Ansätze verglichen. Bei den Kosten zogen sie zum Vergleich einen gleich starken Traktor heran.
Die verschiedenen Unkrautbekämpfungsmaßnahmen koordinierte und bonitierte Tobias Reuter von der Hochschule Osnabrück. Die Aussaat fand am 8. Mai 2024 statt. Die gesamte Fläche wurde danach am 14. Mai blind und am 23. Mai nach dem Auflauf gestriegelt. Zwischen 27. Mai und 5. Juni wurden dann drei verschiedene Konzepte zur Unkrautregulierung in Parzellenversuchen durchgeführt:
klassische Variante mit ganzflächiger Herbizidbehandlung (mit Traktor),
Bandspritzung und einmaliger Hackdurchgang (Traktor und AgBot) sowie
einmaliger Hackdurchgang (AgBot).
Der angedachte zweite Hackdurchgang bei der biologischen Variante ließ sich aus Witterungsgründen durchführen.
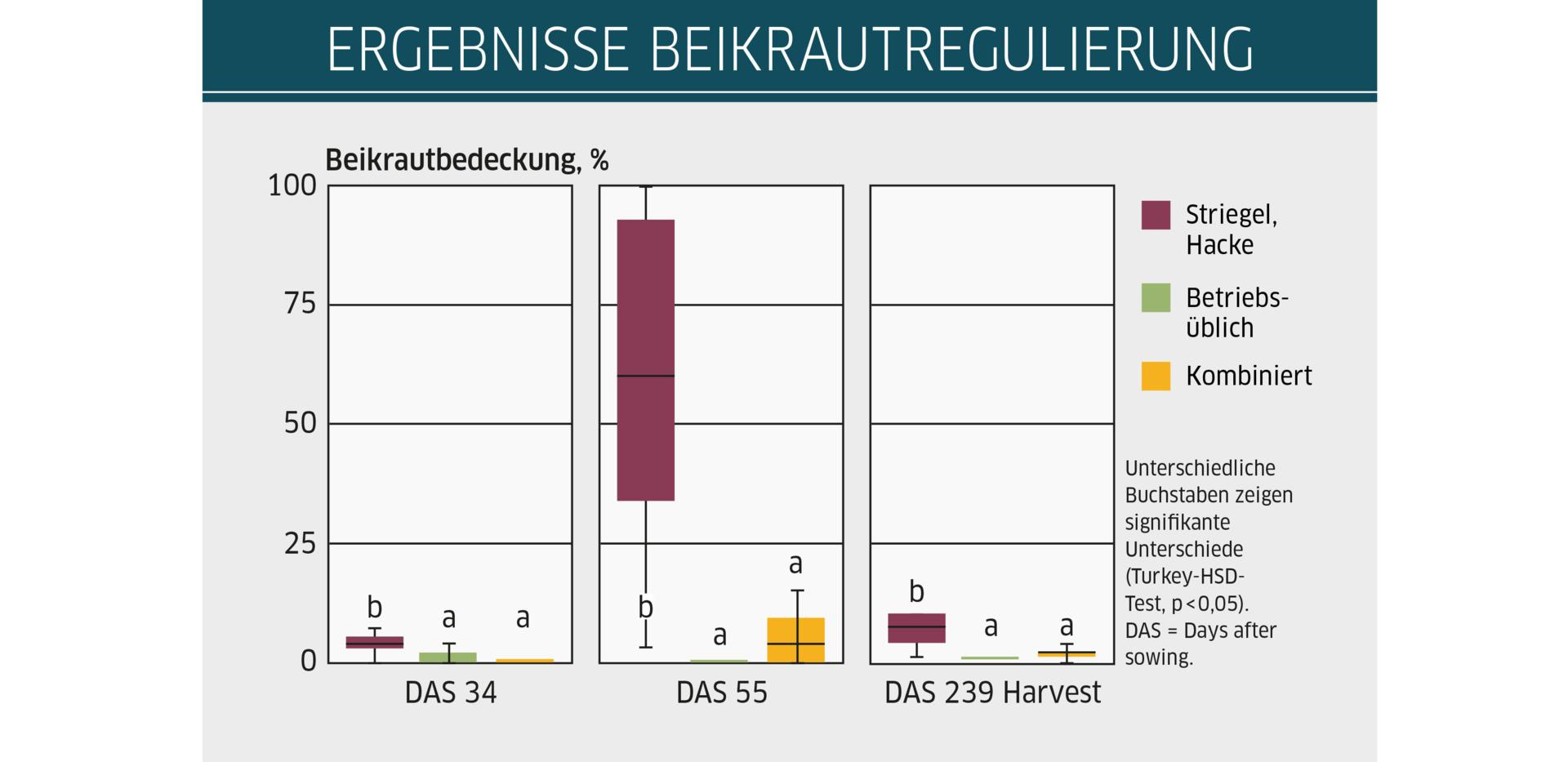
Die Beikrautbedeckung war bei der Flächenbehandlung durchgehend sehr niedrig (Bonitierung in der Grafik „Ergebnisse Beikrautregulierung“.
An zweiter Stelle stand die kombinierte Unkrautbehandlung mit Bandspritzung und Hackeinsatz. Die ausschließlich mechanische Version hingegen war 55 Tage nach der Aussaat deutlich verunkrautet. Hier war besonders stark die Vogelmiere vertreten. Der Mais konnte diese anschließend deutlich unterdrücken, so dass die Konkurrenz überschaubar war und es keine signifikanten Unterschiede im Ertrag gab. Andere Beikräuter können jedoch einen großen Ertragsminderungs-Effekt hervorrufen.
Tobias Jorissen und Maximilian Zurholt von der HS Osnabrück verglichen die Kosten für den AgBot mit denen eines gleich starken Traktors. Dazu ermittelten sie auf zwei Betrieben im Landkreis Osnabrück mit fiktiver Maschinengemeinschaft die tatsächlichen Arbeitszeiten. Die Felder wurden dabei so zusammengestellt, dass der AgBot bzw. ein gleich starker Traktor am Tag etwa 20 ha bearbeiten sollen. Die Flächengröße lag im Schnitt bei etwa 4,5 ha. Je größer die Flächen sind, desto weniger muss der Roboter umgestellt werden.
Pro Tag waren etwa 13 km Fahrtstrecke zu den Flächen notwendig. Das Auf- bzw. Abladen dauert jeweils rund zehn Minuten, so dass je nach Flächenstruktur und Fahrtstrecke dies 5 bis 9 % der Gesamtarbeitszeit bedeutet. Auf den Straßentransport — egal ob mit AgBot auf dem Tieflader oder Traktor mit Anbaugerät — entfallen 3 bis 6 % der Gesamtarbeitszeit. Das Tiefladergespann kalkulierte die HS mit 173 000 Euro. Bei den Maschinenfaktoren wurden übliche Größen eingesetzt: z. B. 800 h Einsatz im Jahr, zwölf Jahre Nutzungsdauer, 30 % Restwert, 3 % Zinsansatz und 2 % Reparaturansatz. Der Lohnansatz betrug 21,50 Euro/h.
Die entstehenden Kosten sind in der Tabelle „Vergleich AgBot gegen Traktor“ dargestellt. Die Investitionskosten haben einen großen Einfluss auf die Arbeitserledigungskosten. So kann der günstige Traktor mit Fahrer die gleiche Arbeit kostengünstiger erledigen als der AgBot, bei dem der Bediener nur 20 % der Zeit vor Ort ist.
Vergleicht man allerdings einen teuren Traktor mit dem AgBot, so ist dieser teurer, wenn der Bediener mehr als die Hälfte der Einsatzzeit den Roboter betreuen muss. Wichtig für den AgBot sind deshalb größere Flächen, bei denen er lange allein arbeiten kann und der Bediener während der Feldarbeit seine Zeit sinnvoller einsetzen kann.
 profi Assistenten
profi Assistenten
 profi Assistenten
profi Assistenten