Die Start-up-Firma Dahlia hat ihren Hackroboter auf der internationalen Agrarroboter-Tagung Fira im Dezember 2021 vorgestellt. Wir haben nun den Prototyp im Einsatz gesehen.
Für den Einsatz des Dahlia 4.3 muss der Landwirt keine Routen planen. Auch ist es nicht nötig, schon bei der Aussaat die RTK-genauen Ablagepositionen der Rübensamen zu dokumentieren. Der autonome Hackroboter findet Rüben- oder Salatreihen allein mit Hilfe von RGB-Kameras, sobald die Pflanzen aufgelaufen sind.
Die einzige Vorarbeit, die der Landwirt einmalig pro Schlag zu erledigen hat, ist das exakte Vermessen der Feldgrenzen und der Vorgewende. Das heißt, die Grenzlinien müssen mit einem RTK-Gerät umrundet und zentimetergenau aufgezeichnet werden.
Bedienung mit Smartphone
Für den Start eines autonomen Hackauftrags fährt der Roboterführer den Dahlia 4.3 manuell gelenkt zum Anfang der ersten Rübenreihe. Dort angekommen, sucht sein Bildverarbeitungssystem die Pflanzenreihen. Sobald es diese erkannt hat, lässt sich der Automatikmodus per App starten.
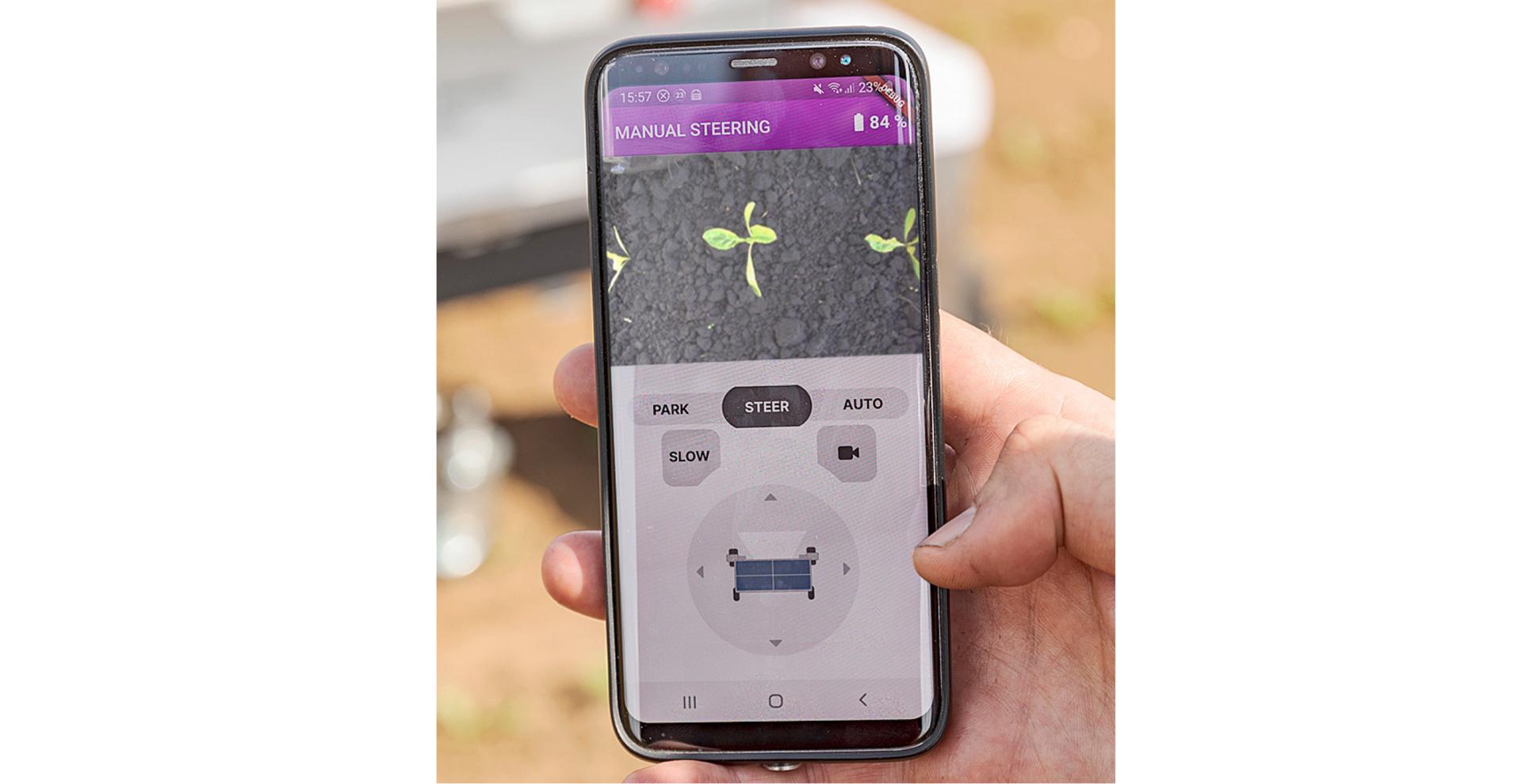
Auch das manuelle Lenken und Fahren führt der Roboterfahrer mit der App aus. Diese zeigt dafür im Display einen virtuellen Joystick an. Außerdem übertragen die Kameras des Hackroboters ihre Live-Videos in die App. So sieht der Maschinenbediener auch aus der Ferne das Gleiche wie die Bildverarbeitung des Roboters.
Präzision im Kriechgang
Nach dem Start des Automatikmodus senken sich die Hackwerkzeuge mit Hilfe eines Linearantriebs in die Arbeitsposition. Hierbei gab es bei unserem Einsatz noch Verbesserungspotenzial. Denn je nach dem, wie weit die Hackmesser im Moment des Absenkens in Richtung Rübenreihe eingeschwenkt sind, treffen sie auf eine Rübe und hacken diese ungewollt aus.
„Das muss nicht sein“, so auch der Softwareentwickler und Firmenmitgründer Torsten Steiner. Deswegen ist laut Hersteller der Prozessablauf inzwischen so programmiert, dass die Messer vor dem Absenken in die geöffnete Position fahren.
Im autonomen Modus fährt der Dahlia aktuell mit nur 0,3 m/s sehr langsam vorwärts. Die Fahrgeschwindigkeit entspricht gerade mal 1,1 km/h, also weniger als Schrittgeschwindigkeit. Das ist nötig, um mit hoher Präzision sehr dicht an der Kulturpflanzen hacken zu können.
Rechnerisch beträgt die Flächenleistung mit der maximalen Arbeitsbreite von 1,50 m nur 0,16 ha/h. Laut Dahlia sollen mit dem Hackroboter in Zuckerrüben zukünftig Flächenleistungen von mindestens 20 ha pro Saison möglich sein.
In der Smartphone-App gibt es für das manuelle Fahren einen Touchscreen-Joystick.
(Bildquelle: Tovornik)
Die Vorderräder sind angetrieben, aber nicht lenkbar.
(Bildquelle: Tovornik)
Jedes Modul mit Prozessor
Der Dahlia 4.3 hackt mit drei Hackmodulen in Zuckerrüben drei Reihen gleichzeitig. Die an Parallelogrammen geführten Module sind an L-Schienen befestigt. Ihr Abstand zueinander lässt sich stufenlos verstellen und somit an verschiedene Reihenweiten von 30 bis 50 cm anpassen. Etwa zum Hacken von Salat – mit 30 cm Reihenabstand – könnte ein viertes Modul montiert werden.
Jedes Modul ist mit einer eigenen Leistungselektronik, einem Grafikprozessor für die Bildverarbeitung und einer Kamera ausgestattet. Die RGB-Kameras haben eine Auflösung von 1 600 x 1 200 Pixel und können bis zu 60 Bilder pro Sekunde aufnehmen.
Für Nachteinsätze haben die Ingenieure von Dahlia an jedem Modul des vorgeführten Prototyps testweise Arbeitsscheinwerfer montiert. Im Serienmodell wird diese Ausstattung noch modifiziert werden.
Zwei Elektromotoren je Modul bewegen mit Hilfe von Kurbelantrieben die Hackmesser, so dass diese in geringem Abstand um die Kulturpflanzen herum hacken — also in der Reihe.
Zwei kleine Vollgummi-Lenkrollen je Modul führen die Hackwerkzeuge in der Tiefe. Problem dieser kleinen Räder: Auf lockerem Boden sinken sie ein, und bei weniger trockenen Bedingungen oder bei viel organischem Material werden sie vermutlich zum Verstopfen und Blockieren neigen. Dahlia will die Tiefenführung daher in zukünftigen Modellen noch ändern.
Mit zwei GNSS-Empfängern weiß der Roboter, in welche Richtung er fährt.
(Bildquelle: Tovornik)
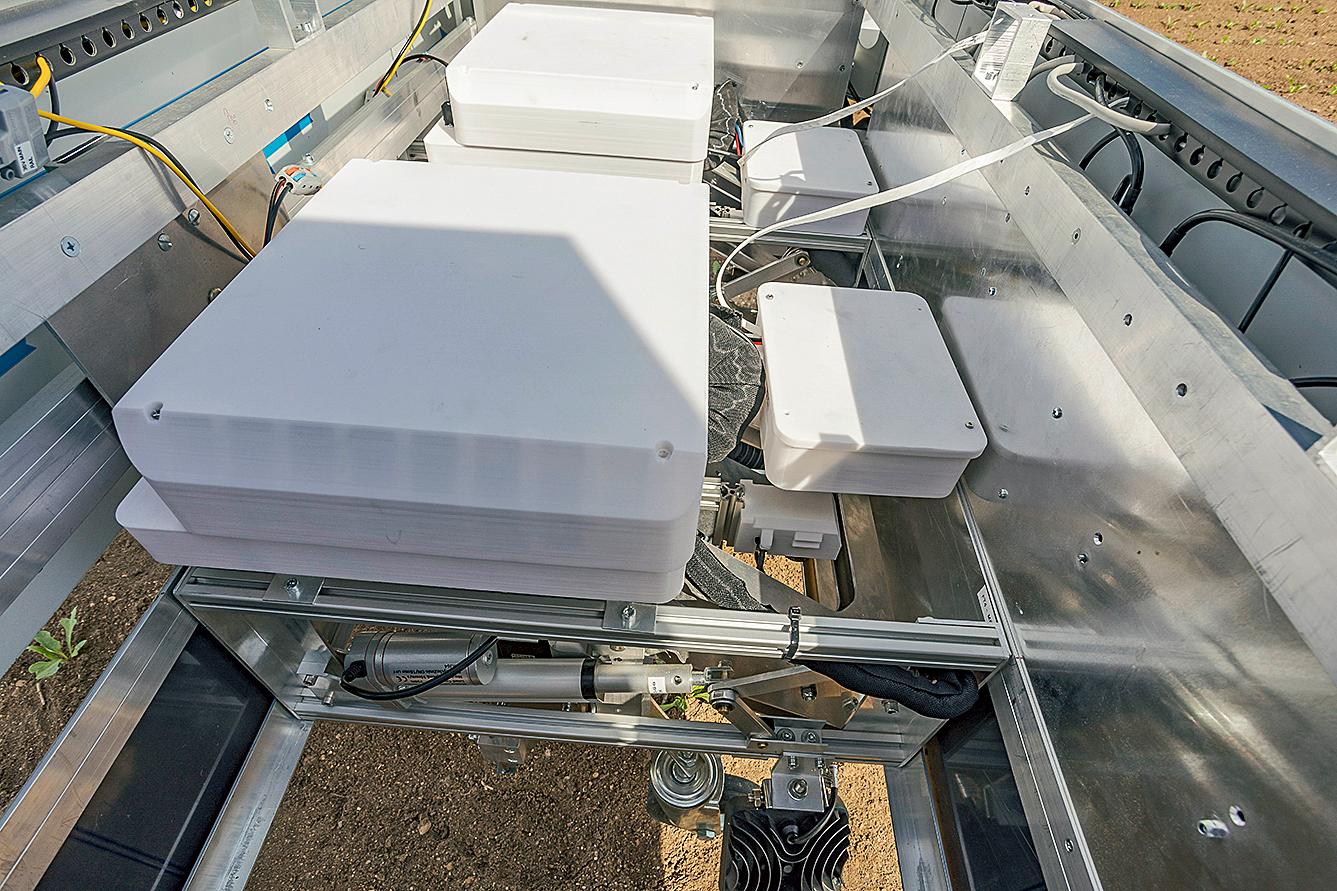
Unter den Modulen liegen die Akkus, die Leistungselektronik und die Grafikprozessoren.
(Bildquelle: Tovornik)
Selbstreinigung geplant
Die Hackwerkzeuge, zwei Stück pro Modul, sind gewinkelte Messer. Diese schafften es bei unserem Einsatz, kleine bis mittelgroße Unkräuter zu entfernen, größere oder auch Unkräuter mit kräftigen Wurzeln blieben stehen.
Ab und zu schüttelten sich die Werkzeuge. Das war eigentlich nicht so gewollt, hatte aber einen positiven Nebeneffekt: Es fielen dabei hängengebliebene Pflanzenteile von den Hackmesser herunter.
Das Mitschleifen von Material ist tatsächlich noch ein Problem, das Dahlia lösen will. Angedacht ist hierfür ein wiederkehrender Automatismus z. B. bei jedem Ausheben der Werkzeuge. „Wir könnten beispielsweise die Hackmesser für die Selbstreinigung ab und zu absichtlich schütteln lassen, indem wir sie maximal und schnell öffnen und schließen“, so Torsten Steiners Überlegung.
Jedes der drei Hackmodule hat seine eigene Elektronik und seine eigene Kamera.
(Bildquelle: Tovornik)
Zwei Elektromotoren schwenken die Hackwerkzeuge zwischen den Rüben in die Reihe.
(Bildquelle: Tovornik)
Der Roboter fährt langsam, dafür lässt er jede Rübe stehen und erfasst alle Unkräuter.
(Bildquelle: Tovornik)
Die Tiefenführung ist verbesserungswürdig. Auch die Beleuchtung will Dahlia ändern.
(Bildquelle: Tovornik)
Digitaler Rübenschutz
Abgesehen davon zog der Dahlia 4.3 auf unserem Zuckerrübenfeld kontinuierlich seine Bahnen. Er erkannte die Reihen und die einzelnen Rübenpflanzen, die sich im Vierblattstadium befanden. Im Normalbetrieb schwenkt der Hackroboter überall dort seine Messer zum Hacken in die Reihe, wo keine Rüben stehen. In diesem Fall könnte es passieren, dass er sich noch im Keimblattstadium befindliche Rüben oder noch nicht aufgelaufene Rüben ebenfalls entfernt. Das sollte nicht passieren. Deshalb hat Torsten Steiner eine Schutzfunktion programmiert. Ist diese aktiviert, hackt der Roboter längere Strecken ohne Bewuchs nicht.
Wenden per GNSS
Am Ende der Reihe weiß der Roboter, dass das Vorgewende beginnt und hebt die Werkzeuge aus. Auch den Verlauf der Reihen im Vorgewende kennt er, weil sie parallel zur aufgezeichneten Grenzlinie verlaufen.
Erst mit dem nächsten Update wird der Dahlia-Hackroboter selbstständig wenden können. Dafür nutzt das System dann zwei GNSS-Empfänger, so dass der Roboter nicht nur seine genaue Position, sondern immer auch seine Fahrtrichtung kennt. Bei unserem Einsatz war das automatische Wenden noch nicht aktiv. Torsten Steiner wendete den Dahlia 4.3 daher manuell.
Nur zwei der vier Räder des Dahlia 4.3 sind elektrisch angetrieben. Damit kann der Hackroboter zum Rangieren auch rückwärtsfahren. Lenkbar sind die Antriebsräder nicht. Für die Kurvenfahrt reduziert die Elektronik die Drehzahl eines kurveninneren Rads und erhöht die des äußeren.
Werkzeuge für das Hacken zwischen den Reihen fehlten. Für die Serie steht das mit auf der Agenda von Dahlia.
Ein Regensensor ist bisher nicht integriert. Der Dahlia 4.3 unterbricht daher bei Regen nicht automatisch seine Arbeit.
Der Hackabstand zu den Rüben ist per App einstellbar.
Der Prototyp des Dahlia 4.3 ist mit nur rund 200 kg ein Leichtgewicht. Die meisten Teile wie Rahmen und Verkleidungen sind aus Kunststoff oder Alu.
Ein Sicherheitssystem mit Hinderniserkennung gab es am Prototyp noch nicht. Lediglich zwei Notaus-Knöpfe waren installiert. Das Serienmodell soll einen Bumper mit Kontaktsensoren erhalten.
Strom für elektrische Antriebe liefern vier Photovoltaikmodule mit jeweils 100 Watt Nennleistung sowie vier Akkus mit insgesamt 1 500 Wh Kapazität. Diese versorgen den Hackroboter laut Dahlia auch bei bewölktem Himmel für mindestens acht Stunden mit Energie.
Fazit
Der neue Hackroboter des jungen Start-up-Unternehmens Dahlia ist ein Prototyp und dient vorerst zur Demonstration der Technologie. Ein Verkaufspreis für das Serienmodell, das Dahlia voraussichtlich im nächsten Frühjahr anbieten wird, stand noch nicht fest. Der Prototyp navigiert mittels RGB-Kameras und intelligenter Bildverarbeitung durch Rüben- oder Salatreihen. Dabei unterscheidet er zwischen Kultur- und Unkrautpflanzen. Seine in die Reihen schwenkenden Messer hacken überall dort, wo keine Rüben stehen. Seine Wirkung gegen kleine Unkräuter war bei unserem Einsatz gut.
Das Start-up Dahlia
Das kleine Start-up besteht zurzeit erst aus den zwei Gründern Torsten Steiner und Giovanni Boglino und einem Mitarbeiter. Steiner ist studierter Informatiker. Da er auf dem Land aufgewachsen ist, kennt er die Probleme von Landwirten mit der Unkrautbekämpfung. Boglino ist gelernter Elektrotechniker und war etliche Jahre als Investmentbanker aktiv. Ihn begeistert die Idee, mit dem Dahlia-Hackroboter die Farm-to-Fork-Strategie der EU zu unterstützen und gleichzeitig den Arbeitskräftemangel in der Landwirtschaft zu lindern.
 profi Assistenten
profi Assistenten
 profi Assistenten
profi Assistenten