profi Assistenten
profi Assistenten
 profi Assistenten
profi Assistenten



Agrarroboter Agrointelli Robotti 150D: Autonomer Geräteträger

Jetzt bestellen und weiterlesen!
profi - Das Fachmagazin für Landtechnik
Heftleser? Jetzt günstig upgraden!
25,80 EUR / Jahr
- Profitieren Sie vom nahtlosen Überang zwischen Heft und Website
- Zugang zu sämtlichen Inhalten auf profi.de
- Zugriff auf alle profi Ausgaben und Sonderhefte (Digital)
- Vorteilspreise im Shop
Jetzt testen und sofort weiterlesen!
BESTSELLER
1,00 EUR
im 1. Monat
danach 12,95 EUR / Monat
Testmonat
- Sorglos testen: Beginnen Sie unverbindlich - jederzeit kündbar
- Zugang zu sämtlichen Inhalten auf profi.de
- Zugriff auf alle profi Ausgaben und Sonderhefte (Digital)
- Vorteilspreise im Shop
Sparen Sie mit dem profi Jahreszugang.
139,80 EUR / Jahr
- Sparen Sie im Vergleich zum monatlichen Abo und genießen Sie den vollen Jahreszugang
- Zugang zu sämtlichen Inhalten auf profi.de
- Zugriff auf alle profi Ausgaben und Sonderhefte (Digital)
- Vorteilspreise im Shop
Gut zu wissen
- Aufträge und Routen werden im Webportal geplant.
- Der Feldroboter arbeitet nur bei gutem Satelliten- und RTK-Empfang.
- Die Ansprechpartner in Deutschland finden Sie bei agrointelli.com unter „About us“.
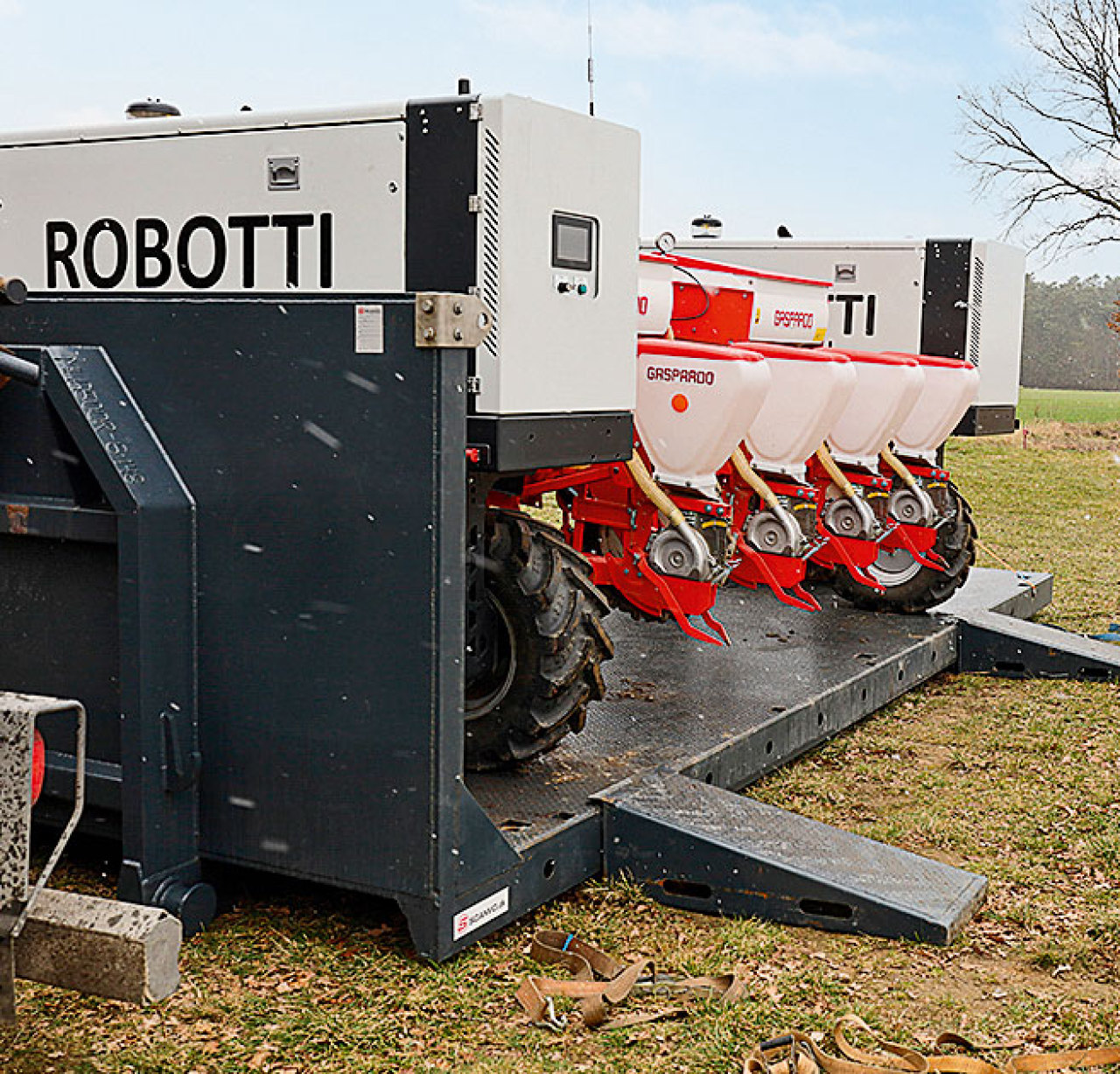
Agrarroboter Agrointelli Robotti 150D: Per Tieflader zum Feld
Angebaut war das Gerät am Dreipunkthubwerk des Robotti. Dieses befindet sich nicht wie bei Traktoren im Heck, sondern im Anbauraum zwischen den vier Rädern. Das Hubwerk kann bis zu 750 kg heben. Außerdem ist der Roboter von Agrointelli mit drei doppeltwirkenden Hydraulikventilen und einer Zapfwelle ausgestattet.
Der Robotti fährt auf vier gleich großen Rädern mit der Bereifung 320/65 R 16 oder 260/70 R 16. Alle vier sind hydrostatisch angetrieben, die vorderen zwei sind lenkbar. Damit kann der Roboter sogar auf der Stelle wenden. Er braucht also wenig Platz am Vorgewende. Zwei Vierzylinder-Dieselmotoren von Kubota mit je 53 kW/72 PS liefern die Energie für den Fahrantrieb und für die weiteren Hydraulikfunktionen.
Autonomes Arbeiten nach Plan
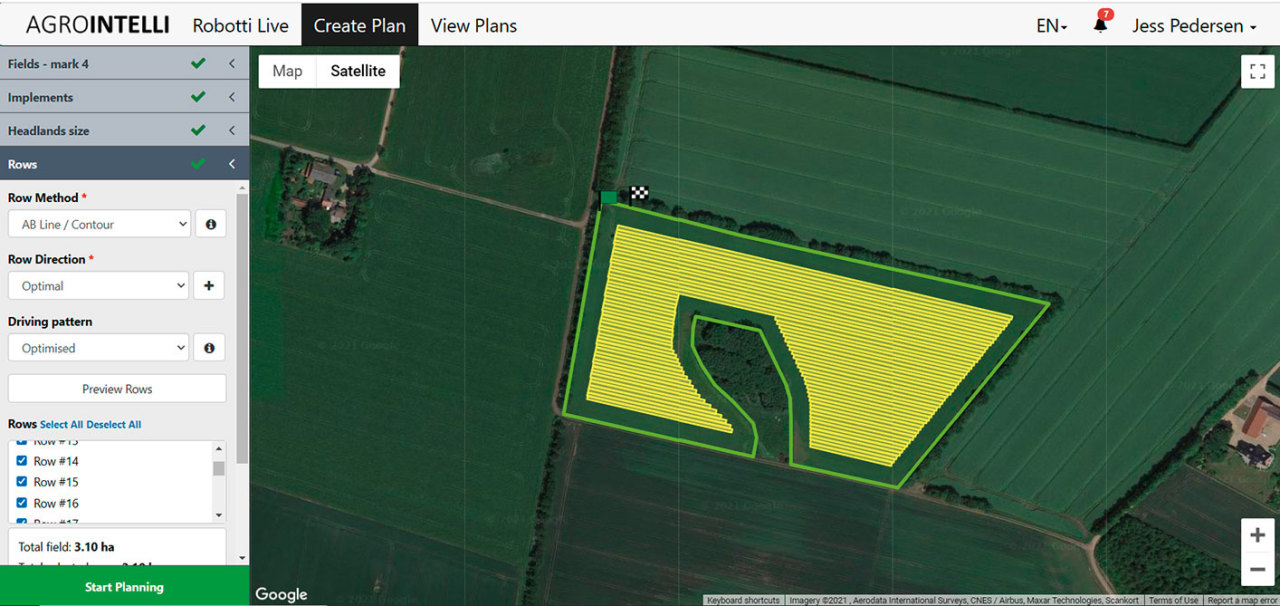
Das alles legt der Betriebsleiter im Webportal von Agrointelli fest: Auszuwählen sind die Feldgrenzen, das Arbeitsgerät, die Breite bzw. die Art des Vorgewendes sowie die Start- und Endpunkte des Einsatzes.
Die Feldgrenzen von neuen Schlägen können als Shape-File in das Portal hochgeladen werden. Ansonsten findet der Anwender bereits vorhandene Felder in einer Liste. Ebenso sind bereits eingepflegte Anbaugeräte aus einer Liste auswählbar. Beim Erfassen neuer Geräte müssen die Abstände des Arbeitsaggregats zur GPS-Antenne sowie weitere wichtige Parameter für die automatische Gerätesteuerung hinterlegt werden: z. B. Fahrgeschwindigkeit, Arbeitsbreite, Aushubhöhe und Absenktiefe, Schwimmstellung ja oder nein, Zapfwellenbetrieb.
Das webbasierte Programm berechnet automatisch das ideale Spurmuster für den Schlag und das Anbaugerät, nachdem Fragen zum gewünschten Spurverlauf beantwortet sind. Zum Beispiel, ob der Roboter auf der Stelle wenden soll, ob es für schräge Vorgewende eine Section-Control-Funktion gibt, oder ob der Roboter parallel zu einer Feldgrenze arbeiten soll. Die AB-Referenzlinie lässt sich alternativ auch manuell festlegen, oder es kann eine bereits aufgezeichnete Spur aus einem anderen Lenksystem hochgeladen werden. Darüber hinaus gibt der Betriebsleiter vor, wie der Roboter die Spuren abarbeiten soll, z. B. Spur für Spur, in Schleifen oder in Beeten.
Nachdem alle Fragen beantwortet sind, zeigt eine Vorschau das Spurmuster. In dieser Vorschau kann der Betriebsleiter durch Anklicken einzelne Spuren ausschließen. Entspricht das Spurmuster seinen Vorstellungen, startet er die Aufbereitung des Spurplans für den Robotereinsatz — in unserem Fall für die Maisaussaat mit einem vierreihigen Einzelkornsägerät.
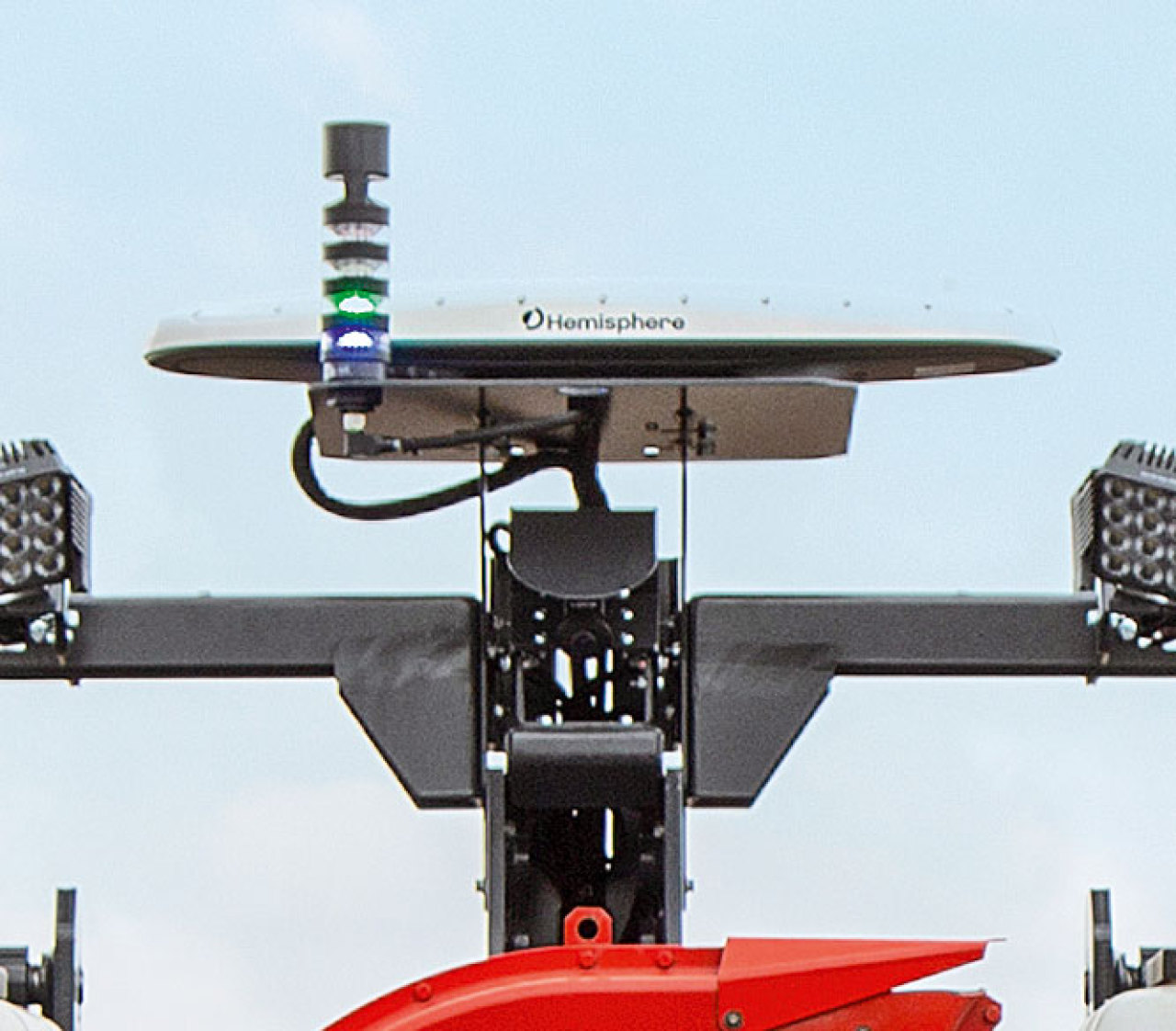
Die Verarbeitung der Daten kann wenige Minuten bis zu einer Stunde in Anspruch nehmen. Je größer und komplexer das Feld ist, desto länger dauert der Prozess. Sobald der Auftrag mit den Spuren fertig ist, sendet das Webportal eine E-Mail an den Betriebsleiter und gibt ihm auf diese Weise Bescheid, dass der Roboter nun startklar ist. Per Mobilfunk hat die Robotersteuerung Zugriff auf die für ihn im Webportal hinterlegten Arbeitsaufträge. Am Display des Roboters wählt der Betriebsleiter den Auftrag aus. Nach dem Start des Auftrags zieht der Roboter satellitengelenkt Runde für Runde seine Bahnen. Dafür ist er mit einem GNSS-Empfänger mit 20 Hz von Hemisphere ausgestattet, der die Satellitensignale mit RTK korrigiert. Möglich ist dies mit Korrekturdaten aus einem RTK-Netz oder von einer festen Basisstation. Bei dem Einsatz in Suderburg navigierte der Roboter mit dem RTK-Signal aus dem Netz von geo-konzept.
Im Feld gefangen
Drittens erkennt ein 3D-Scanner Hindernisse. Der Roboter bremst und bleibt zur Not stehen, wenn sich z. B. ein Mensch oder ein Tier im Sichtfeld des sogenannten Lidar-Sensors befindet. Viertens sind vorne und an den Seiten Tastbügel montiert. Bei Gegendruck stoppt der Roboter sofort seine Fahrt. Und als allerletzte Sicherheitsstufe gibt es Notausknöpfe an der Maschine. Auch mit Hilfe der Fernbedienung oder über die Stoppfunktion im Webportal lässt sich der Roboter im Notfall zum Anhalten bringen.
Verschwindet das Hindernis nicht innerhalb einer einstellbaren Zeitspanne aus dem Sichtfeld des Laserscanners, bleibt der Roboter stehen und fährt nicht wieder selbstständig los. Der Maschinenbediener muss dann die Automatik am Display des Roboters erneut aktivieren.
Überwachung aus der Ferne
Was uns sonst noch auffiel:
- Bei der Vorführung in Suderburg verlief die Maissaat fehlerfrei. Das webbasierte Planungstool ist einfach zu bedienen. Eine deutschsprachige Version des Portals ist laut Hersteller in Vorbereitung.
- Die Bauform des autonom arbeitenden Geräteträgers beschränkt die Arbeitsbreite auf maximal 3 m. Eine flächendeckende Bodenbearbeitung z. B. mit einem Grubber ist nicht möglich, ohne das bearbeite Land zu befahren.
- Die Hub- und Zugkraft könnten für schwere Geräte nicht immer ausreichen.
- Seit Juni 2021 hat Agrointelli in Kirchberg an der Jagst im Landkreis Schwäbisch Hall eine deutsche Filiale. Außerdem gibt es dort ein Testfeld für Robotereinsätze in der Nähe.
- Die maximale Fahrgeschwindigkeit des Robottis betrug bei unserem Einsatz nur 5 km/h. Agrointelli will der Robotersteuerung zukünftig erlauben, diese auf bis zu 8 km/h zu erhöhen.
- Farbige LED zeigen den Betriebsstatus des Robotti an: manuelle oder autonome Fahrt, Stopp wegen Hindernisse oder technischer Probleme.
- Der Preis für den Robotti 150 D beträgt in der Standardausstattung 165 000 Euro ohne Mehrwertsteuer.